
Cooperative Multi-Robot Framework Using Artificial Immune System and Fuzzy Logic

Cooperative Multi-Robot Framework Using Artificial Immune System and Fuzzy Logic
Muhammad Saeed Shah1, Fazal Nasir2, Sana Ul Haq1 and Muhammad Tahir Khan2*
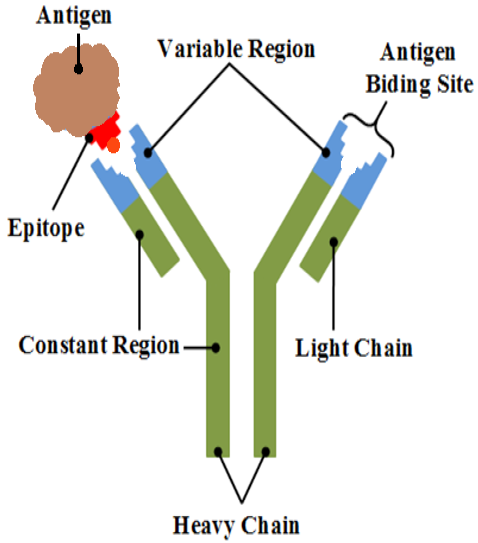
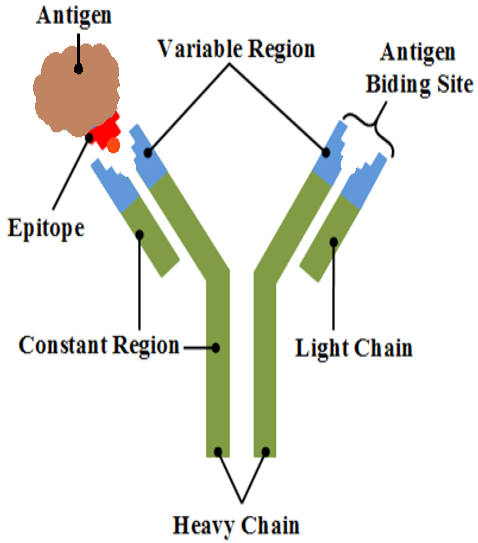
Antibody’s structure.
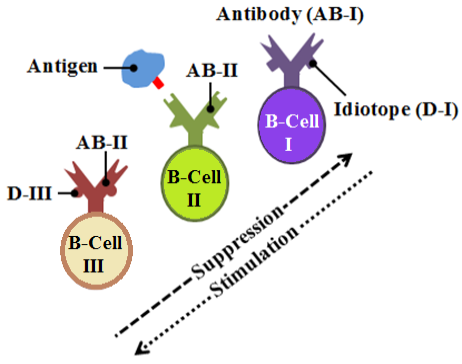
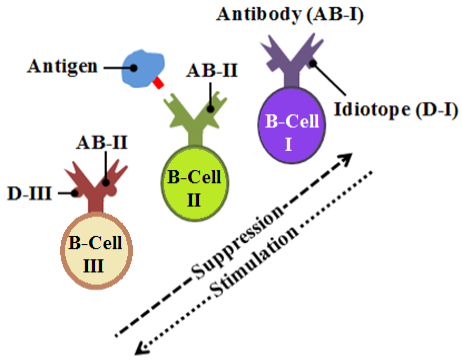
Idiotypic network theory.
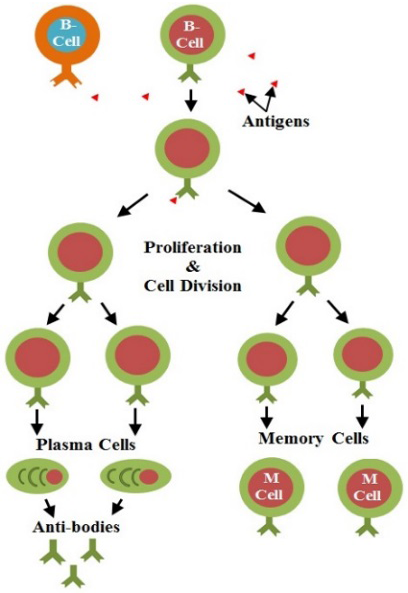
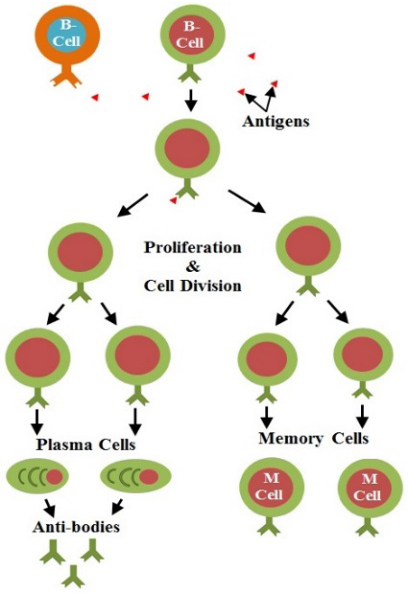
Clonal selection theory.
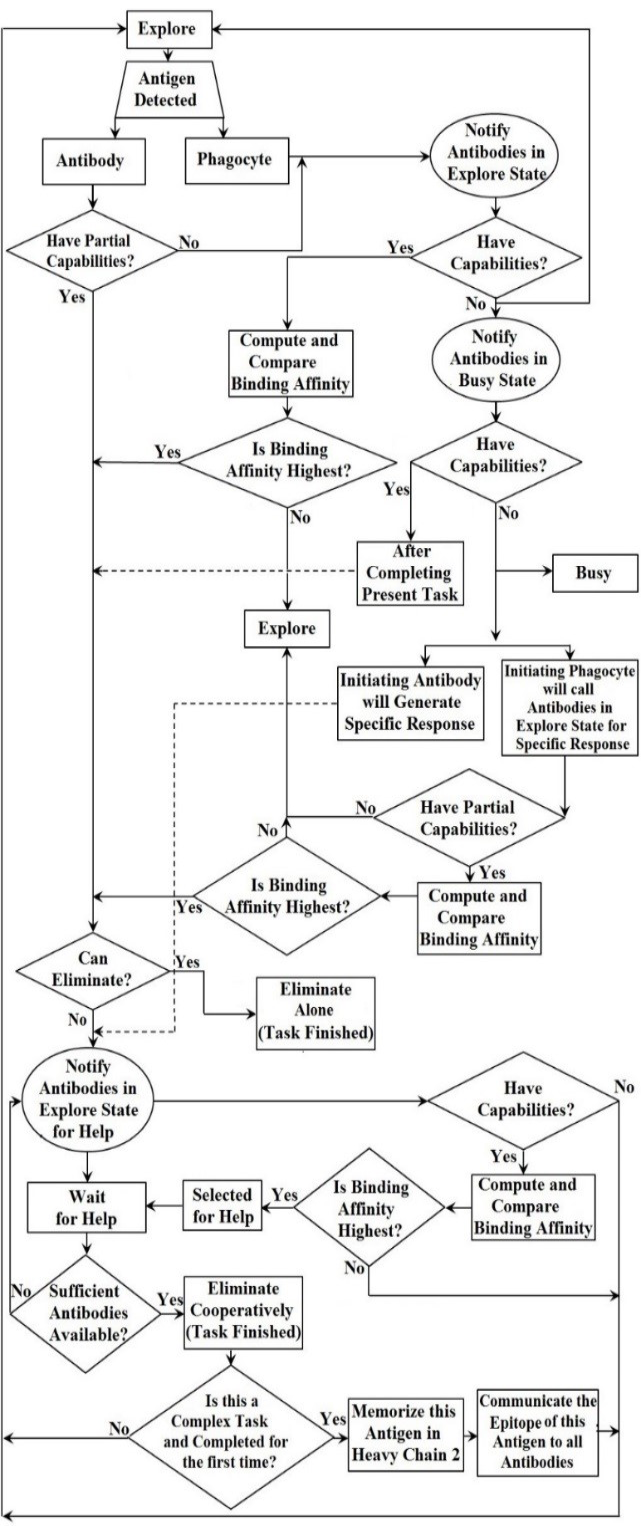
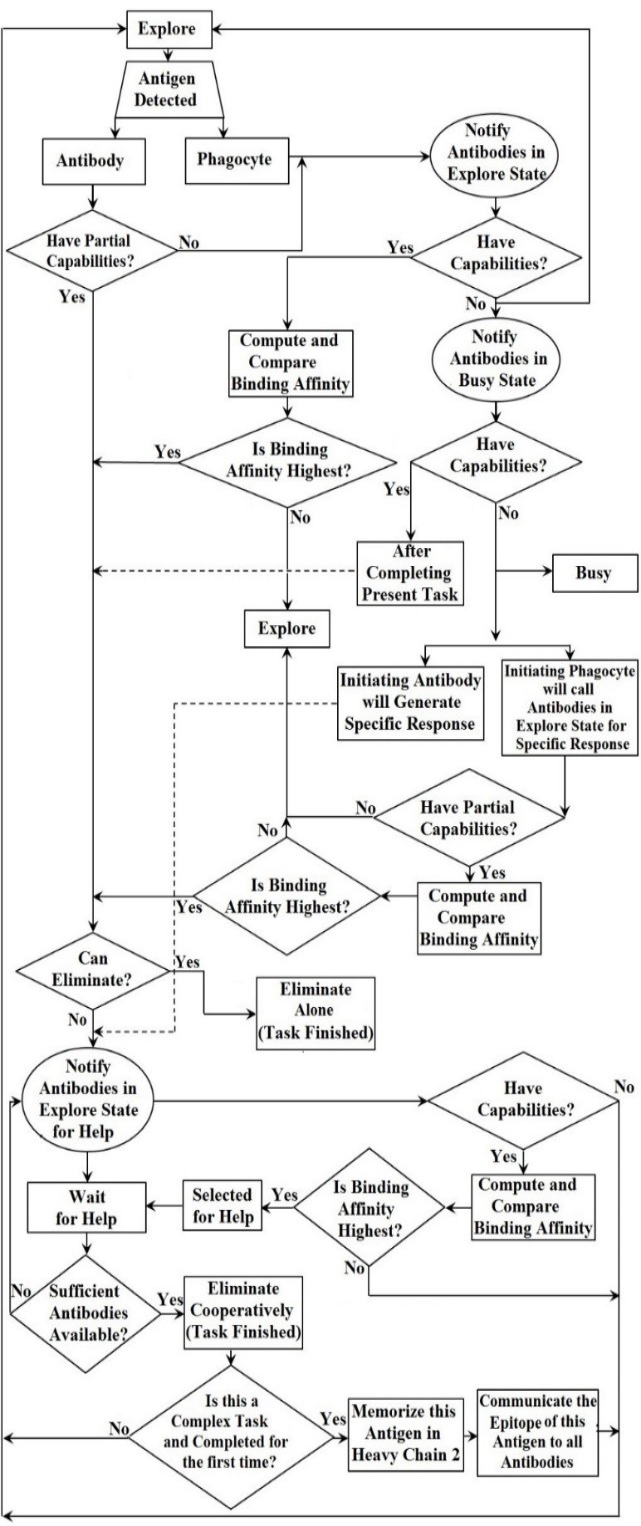
Control framework for MRC.
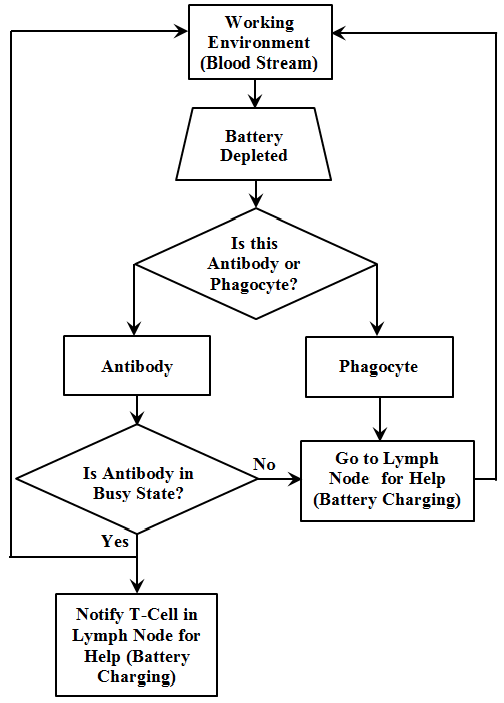
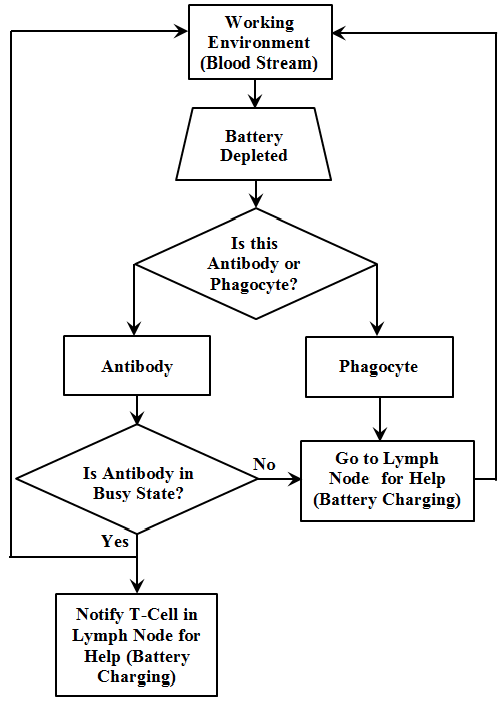
Flowchart for battery charging of a robot.
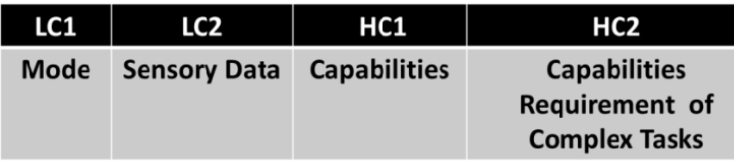
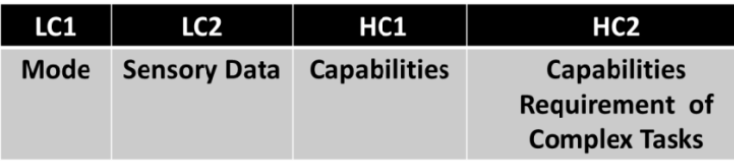
Antibody’s (B-robot) light and heavy chains.
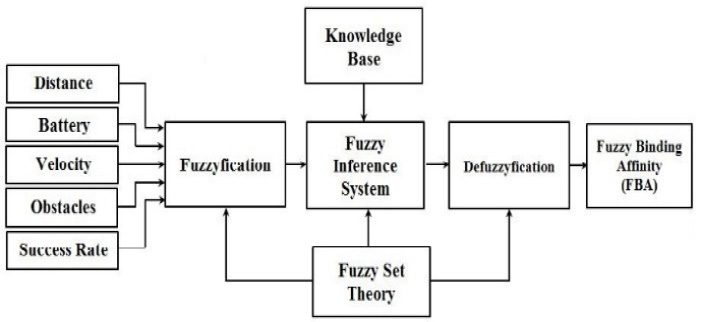
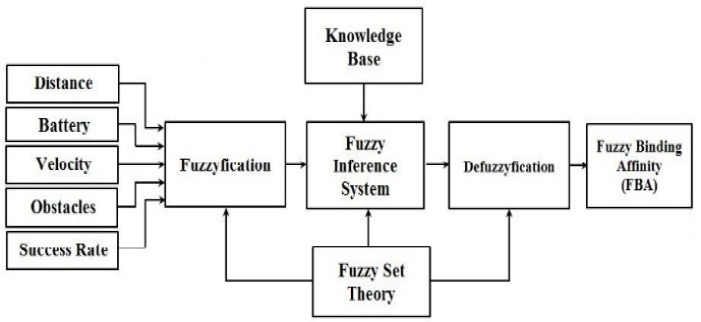
Block diagram of the proposed algorithm for fuzzy binding affinity.
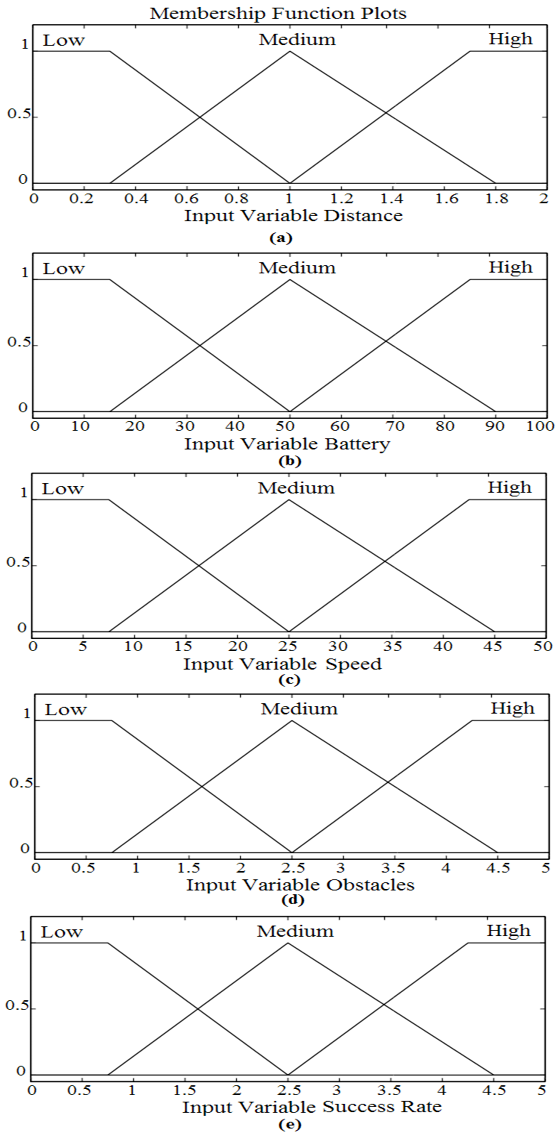
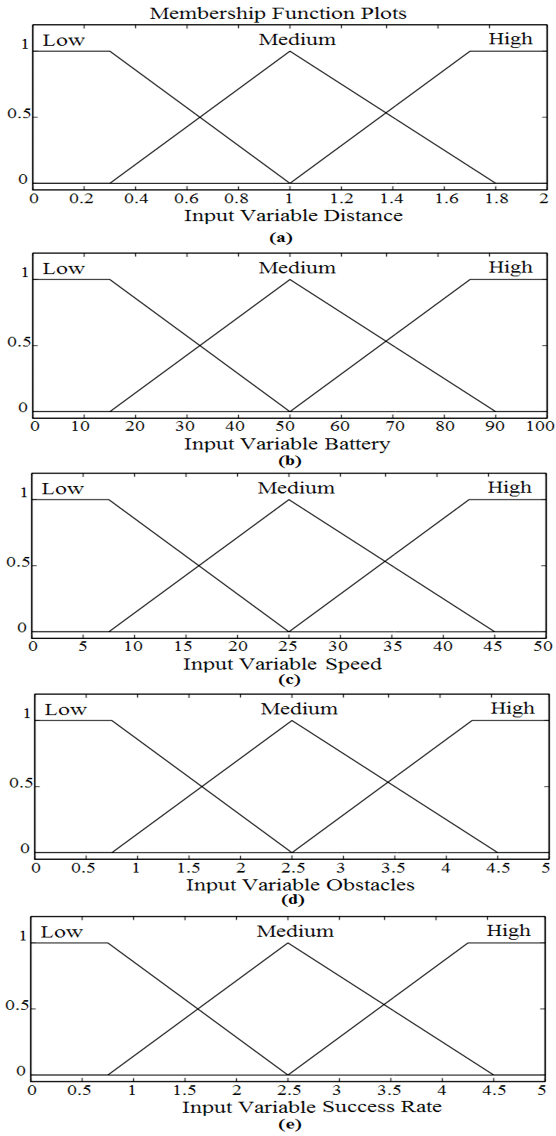
Input membership functions:(a) Distance, (b) Battery, (c) Speed, (d) Obstacles, (e) Success rate.
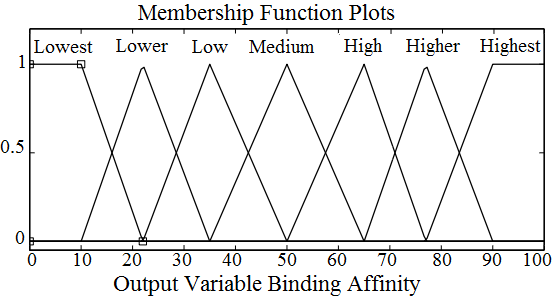
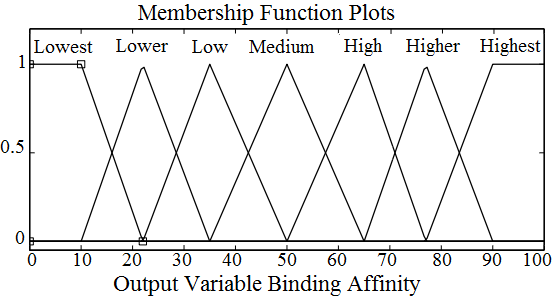
Output Binding Affinity membership function.
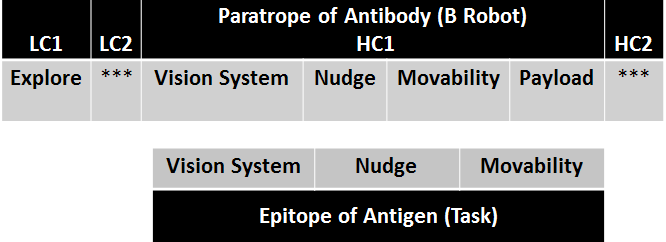
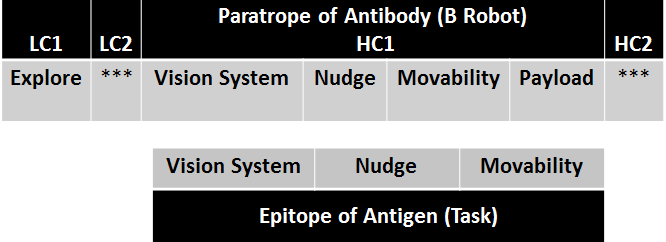
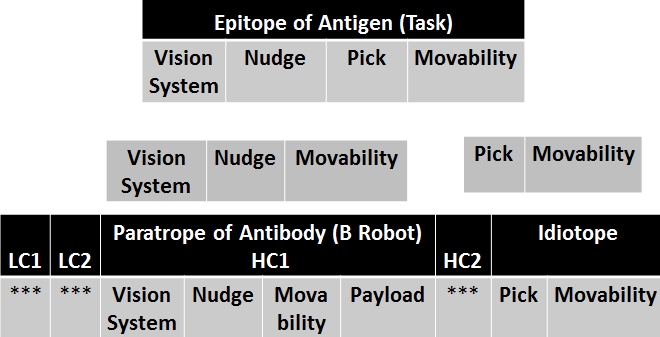
Comparison of the paratrope of antibody (B-robot) with epitope of task.
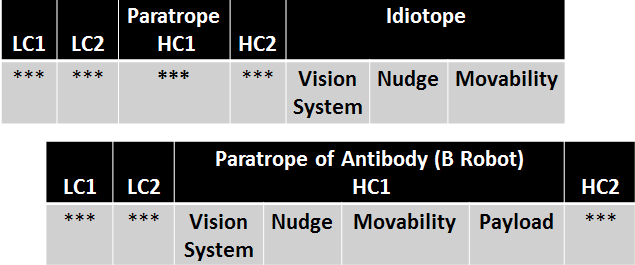
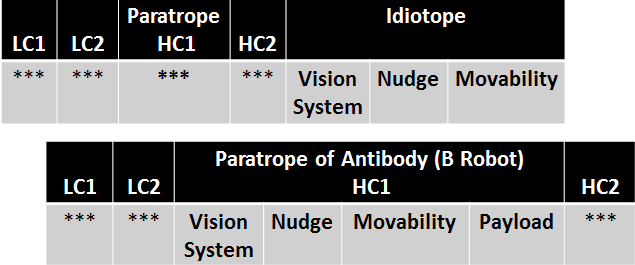
Matching of the antibody (B-robot) paratrope and idiotope.
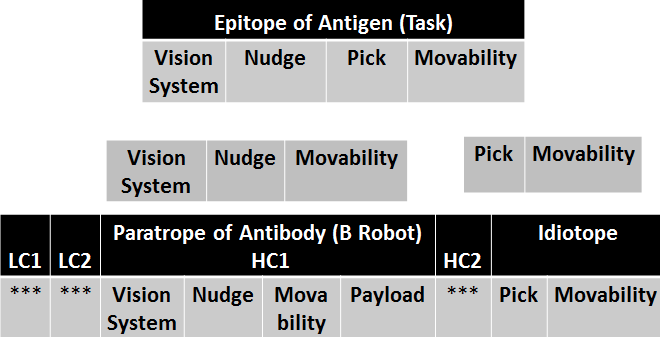
Response of the antibody to a complex antigen (task).
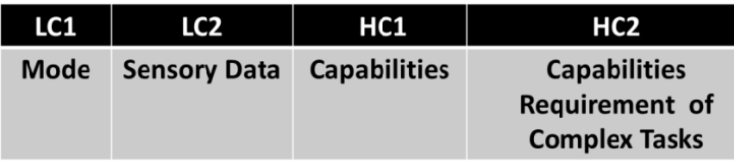
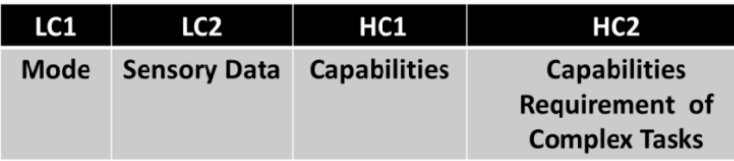
Heavy chain HC2 showing capabilities of the task accomplished through a specific response.
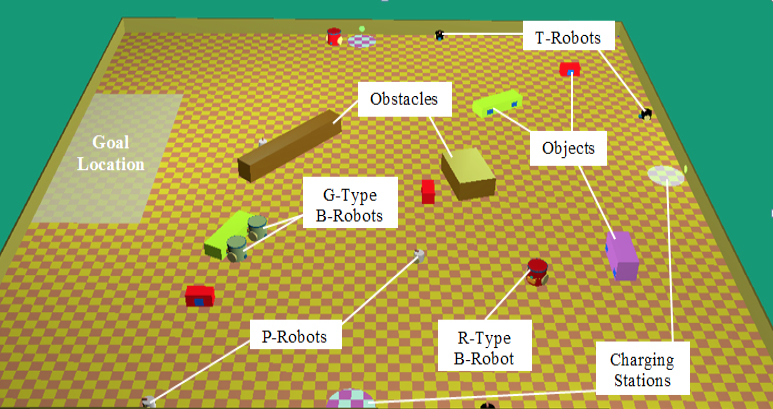
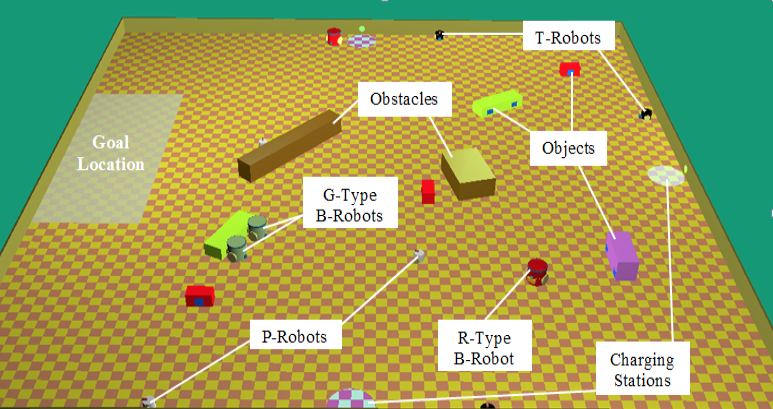
Simulation platform.
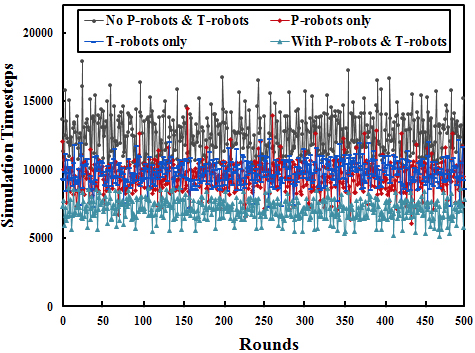
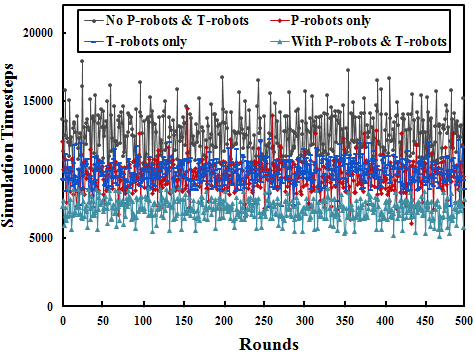
Time (stpes) spent in each run to complete the tasks.
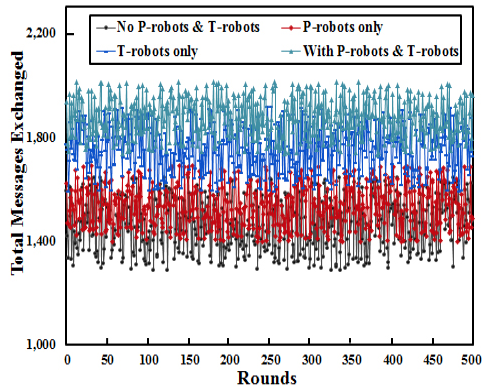
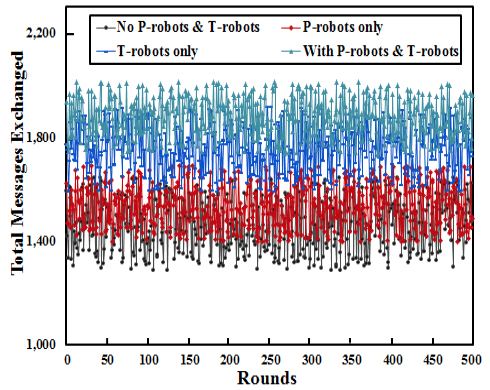
Total messages exchanged during task accomplishment in each run.
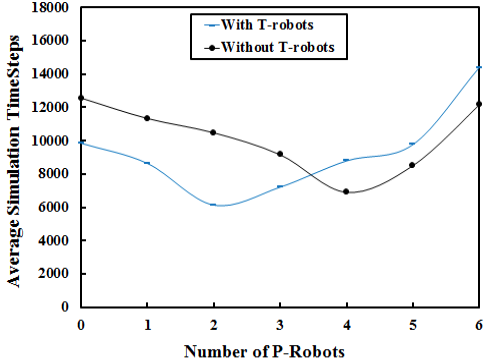
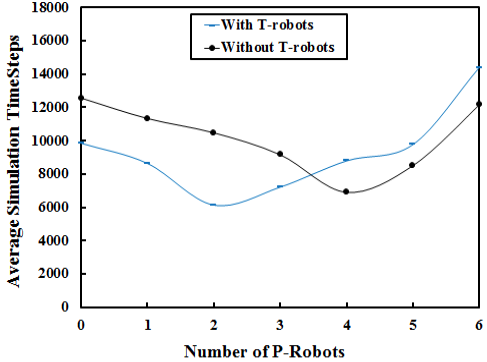
Average time (steps) taken to complete the tasks as a function P-robots.
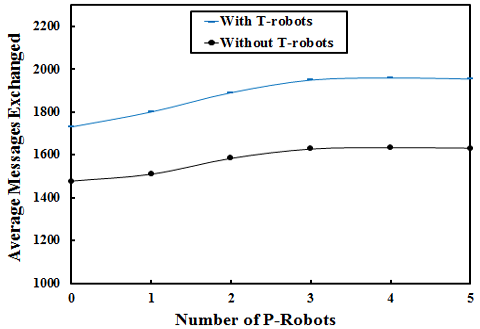
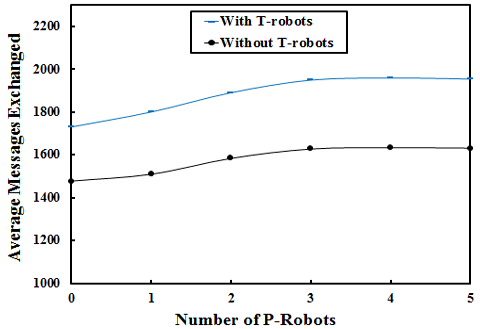
Average messages exchanged during tasks completion as a function of P-robots.
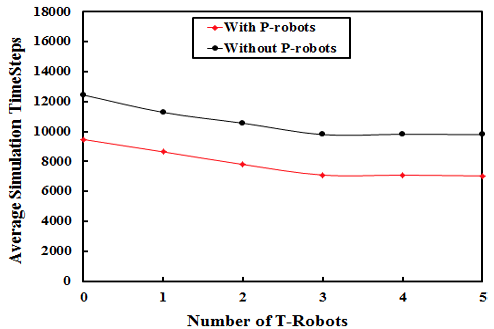
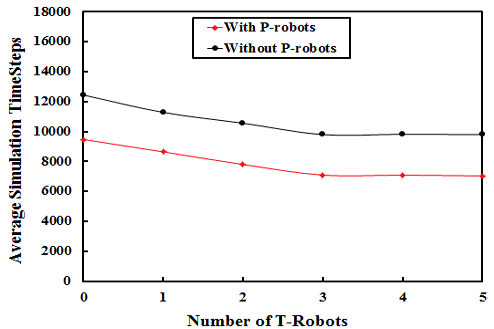
Average time (steps) taken to complete the tasks as a function T-robots.
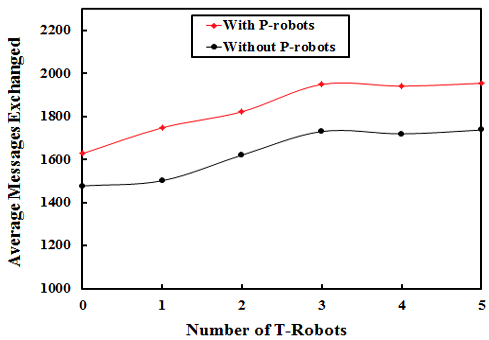
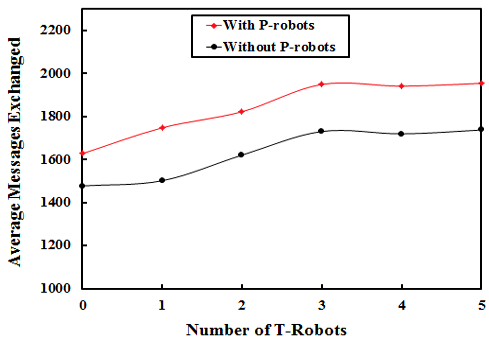
Average messages exchanged during tasks completion as a function of T-robots.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}